ブログ一覧
2016-10-18
らずらいと姫の挑戦日記(第25回)~組込マイコンンとコンピュータの違い~
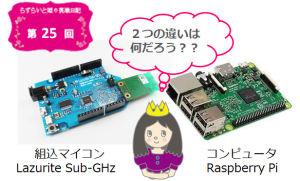
今月開催されたCEATECで皆様からご質問を頂いたことを記事にまとめてみます。今回は組込マイコン(Lazurite SubGHz)とコンピュータ(RasberryPi)の違い
です。見た目は似ている2台ですが、どんな事に使えて、どんな特長があるのでしょうか。…続きを読む
2016-10-07
ORIZURUの裏話 4回目「開発後記」

こんにちは、Lazuriteの開発者1号です。今年もORIZURUは非常に多くの方に観ていただく事ができました。そして、多くの方に「昨年より進化したね」「安定したね」と声をかけていただき、嬉しい限りです。
さて、最終回は今回はじめてチャレンジした空を飛ぶ飛行体の制御プログラムについて苦労した話をまとめました。…続きを読む
2016-10-05
ORIZURUの裏話 第一回目「ORIZURUに込めた思い」
LazuriteはCEATEC2016 IoT/CPS展にロームのブースで出展しています。そして、今年のCEATECブースでは昨年から進化したORIZURUを披露しました。2016年度版ORIZURUの詳細について記載してまいります。
…続きを読む
2016-09-27
らずらいと姫の挑戦日記(第24回)

CEATECのデモ機を製作するシリーズの最後、今回はRaspberry Piのカメラを利用して顔認識を行い、認識した顔の数に応じてモーターの強弱を制御するにチャレンジです。とはいっても今回は、Lazuriteの開発者1号が自分のRaspberry Piを使用してソフトウエアを開発したので、自分に渡されたRaspberry Piでも動くようにするのが今回のテーマです。今回はRaspberry Pi3を使用しました。
また、全て終わるのに2-3時間かかりますし、待ち時間も長いので何かしながら作業したほうが良いです。
…続きを読む
2016-09-20
らずらいと姫の挑戦日記(第23回)~加速度センサーでモータを動かす~

10月4日から開催するCEATECに出展するデモの開発の3回めです。
前回でモーターの準備が出来たので、加速度センサーの値を無線で送信して、それに連動してモーターを動かすデモを完成させました。…続きを読む
2016-09-16
Raspberry Pi(Jessie)ライブラリの一覧とインストール方法
Raspberry Pi (Jessie)用 Lazurite APIの技術情報のまとめです…続きを読む
2016-09-14
Raspberry Pi (Jessie)のapt-get upgradeについて
Raspberry Pi (Jessie)のカーネルを使用して「sudo apt-get upgrade」を実行すると、LazDriverが使用できなくなります。
その時の対応方法に関する記事です。…続きを読む
2016-09-13
らずらいと姫の挑戦日記(第22回)~モーターケース~
今回は、モーターが回る受信側のデバイス制作の過程をお伝えします。
配線を繋ぐはんだ付けをしたり、3Dプリンタを使ったりと、試行錯誤しております・・・…続きを読む