らずらいと姫の挑戦日記
2017-05-17
らずらいと姫の挑戦日記(第38回)~920J用ボタン基板を動かす~
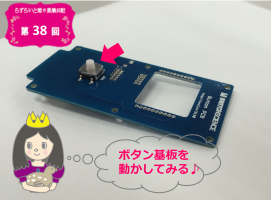
スイッチサイエンスさんから、Lazurite 920Jに対応したシールドが3種類発売されました!!…続きを読む
2017-02-15
らずらいと姫の挑戦日記(第37回)~構造体~

先週は、配列で文字列を扱うところを勉強しました。
今回は、さまざまな型を一つのカタマリで扱うことが出来る『構造体』について勉強します。…続きを読む
2017-02-07
らずらいと姫の挑戦日記(第36回)~文字列~

文字列は配列を使うと扱いやすい、ということがわかりました。しかし、文字列は一文字ずつ扱うと大変なので「文字列」として扱うための関数が準備されています。今回は、文字列の①コピー②比較③文字列を数字に変換の3つについて学びたいと思います。
…続きを読む

2016-12-23
らずらいと姫の挑戦日記(第34回)~milkcocoaを頂きました♪~

らずらいと姫の挑戦日記ですが、今回はLazuriteの開発者1号が代わってお届けします。
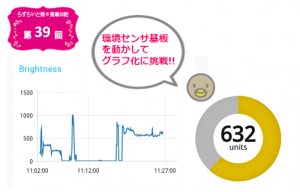
今回は、クラウドサービスでNode-redから株式会社ウフルさんが提供しているクラウドサービス Milkcocoaとenebularを使用して、1秒間隔で送信する加速度センサーの値をクラウド上で可視化するという事にチャレンジしてみました。Node-REDからクラウドで可視化する部分を中心に記載します。…続きを読む

2016-12-07
らずらいと姫の挑戦日記(第32回)~Node-Redを使ってみた~
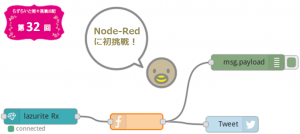
今回は、CTセンサーと呼ばれる電流センサーの値を無線で送信してtwitterでつぶやく、というプログラムをNode-Redを使って初挑戦したいと思います!…続きを読む
2016-11-30
らずらいと姫の挑戦日記(第31回)~プリント基板見積もりまで♪~

Board(図面)作成は、第27回の記事の通りなので省略して、DRC(デザインルールチェック)とガーバーデータ作成、そして実際に見積もりをとってみました♪…続きを読む

2016-11-16
らずらいと姫の挑戦日記(第29回)~EAGLEでライブラリを作成~

先週はプリント基板が簡単に作れることや、その構造についてご説明しました。
今週からEagle CADの使い方を紹介していきたいと思います。…続きを読む

2016-11-01
らずらいと姫の挑戦日記(第27回)~プリント基板の設計に挑戦~
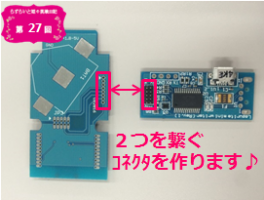
Lazurite 920J とBLE ShiledとLazueire mini writerを繋ぐため、ealgeによるプリント基板の設計にチャレンジしてみたいと思います。
…続きを読む
2016-10-25
らずらいと姫の挑戦日記(第26回)~組込マイコンとコンピュータの違い②~

今回は、組込マイコンを使用する上で避けては通れない、『メモリ』の仕組みについて勉強します。
…続きを読む
2016-10-18
らずらいと姫の挑戦日記(第25回)~組込マイコンンとコンピュータの違い~
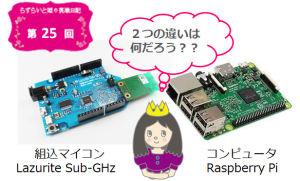
今月開催されたCEATECで皆様からご質問を頂いたことを記事にまとめてみます。今回は組込マイコン(Lazurite SubGHz)とコンピュータ(RasberryPi)の違い
です。見た目は似ている2台ですが、どんな事に使えて、どんな特長があるのでしょうか。…続きを読む
2016-09-27
らずらいと姫の挑戦日記(第24回)

CEATECのデモ機を製作するシリーズの最後、今回はRaspberry Piのカメラを利用して顔認識を行い、認識した顔の数に応じてモーターの強弱を制御するにチャレンジです。とはいっても今回は、Lazuriteの開発者1号が自分のRaspberry Piを使用してソフトウエアを開発したので、自分に渡されたRaspberry Piでも動くようにするのが今回のテーマです。今回はRaspberry Pi3を使用しました。
また、全て終わるのに2-3時間かかりますし、待ち時間も長いので何かしながら作業したほうが良いです。
…続きを読む
2016-09-20
らずらいと姫の挑戦日記(第23回)~加速度センサーでモータを動かす~

10月4日から開催するCEATECに出展するデモの開発の3回めです。
前回でモーターの準備が出来たので、加速度センサーの値を無線で送信して、それに連動してモーターを動かすデモを完成させました。…続きを読む
2016-09-13
らずらいと姫の挑戦日記(第22回)~モーターケース~
今回は、モーターが回る受信側のデバイス制作の過程をお伝えします。
配線を繋ぐはんだ付けをしたり、3Dプリンタを使ったりと、試行錯誤しております・・・…続きを読む
2016-09-06
らずらいと姫の挑戦日記(第21回)~Lazurite Fly~
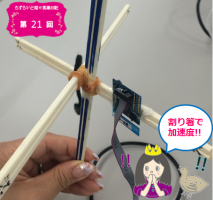
「CEATEC用の展示デモ機を製作しろ!!」と命をうけてしまいました.....
周りの人に教えてもらいながら、皆様に触っていただけるデモ機を作りたいと思いますので、その制作過程をまとめていきたいと思います。
まず最初は、Lazurite Flyを使って①「手をあげたらモーターが回る」②「振ったらモータが回る」という2つの小型デバイスを作りたいと思います。Lazurite Flyには加速度センサーが内蔵されていますのでその機能を使っていきます。…続きを読む